自動車工学教材、シミュレータ、立体模型、カット・モデル、ビデオ、エンジン実習装置、コンピュータソフト、電気実習装置、などの企画製造販売
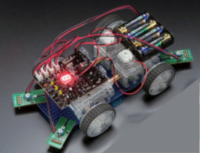
4センサロボット4WDキット
ロボット4WDカーを組み立て小型コンピュータでプログ
ラミングを制御しよう!  |
■注文番号 製品名:
LM300-4SD 4センサロボット4WDキット
■製品説明:
セット内容:4センサロボット1セット + 小型コンピュータ(完成品)1台 + 学習テキスト(プログラミング解説)1冊
ロボット4WDカーの制作時間 2〜4時間
プログラミング時間1〜2時間(基本)
■仕様
●センサ:マイクロスイッチ、フォトセンサ
●出力:2モータ
●電源:単三電池x4本
■機能
●赤外線リモコン操作
●ロボットモード(プログラミング)
センサロボットのファイル1〜3には、あらかじめ以下のプログラムが収録されています。
【ファイル1】前進→センサON→後退→方向転換→前進
【ファイル2】センサON→10秒間前進→停止
【ファイル3】2センサ(赤外線センサ)ON→ライントレース
小型コンピュータでロボット4WDカーをプログラミング制御しよう!

プログラム作成
「小型コンピュータ」でプログラムを作成・転送してロボット4WDカーを制御することができます。
《順次処理》仕事を順番に実行し行くこと例えば
開始
↓
処理1
↓
処理2
↓
終了
《反復処理》同じ仕事を繰り返し行うこと
開始
↓
繰返し開始
↓
処理1
↓
処理2
↓
繰返し終了
↓
終了
《分岐処理》ある条件の結果によって、処理の流れを変えること
開始
↓
条件
↓
処理1 処理2
↓
終了